ControllerNode.hpp File Reference
Declaration of the ControllerNode class, a ROS 2 lifecycle node for speed computation in Easy Navigation. More...
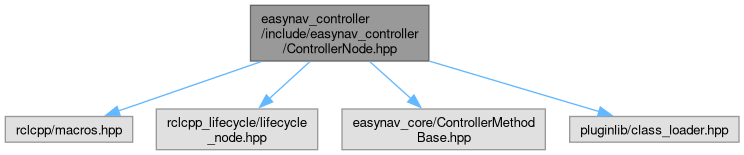
#include "rclcpp/macros.hpp"#include "rclcpp_lifecycle/lifecycle_node.hpp"#include "easynav_core/ControllerMethodBase.hpp"#include "pluginlib/class_loader.hpp"
Include dependency graph for ControllerNode.hpp:
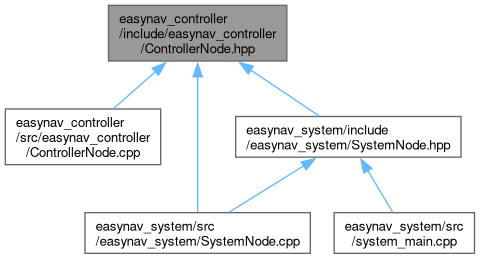
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ControllerNode |
| ROS 2 lifecycle node that manages calculating speeds for the Easy Navigation system. More... | |
Namespaces | |
| namespace | easynav |
Detailed Description
Declaration of the ControllerNode class, a ROS 2 lifecycle node for speed computation in Easy Navigation.
Declaration of the ControllerNode class, a ROS 2 lifecycle node for calculating speeds tasks in Easy Navigation.
Generated by