DetectionsPerception.cpp File Reference
#include <string>#include "vision_msgs/msg/detection3_d_array.hpp"#include "rclcpp/time.hpp"#include "rclcpp_lifecycle/lifecycle_node.hpp"#include "easynav_sensors/types/DetectionsPerception.hpp"#include "pluginlib/class_list_macros.hpp"
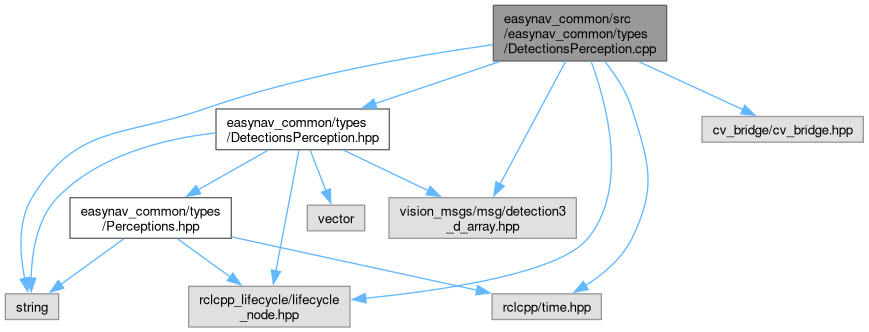
Include dependency graph for DetectionsPerception.cpp:
Namespaces | |
| namespace | easynav |
Functions | |
| rclcpp::Time | get_latest_detections_perceptions_stamp (const DetectionsPerceptions &perceptions) |
| Retrieves the latest timestamp among a set of detection-based perceptions. | |
Generated by