ImagePerception.hpp File Reference
Defines data structures and utilities for representing and processing image perceptions. More...
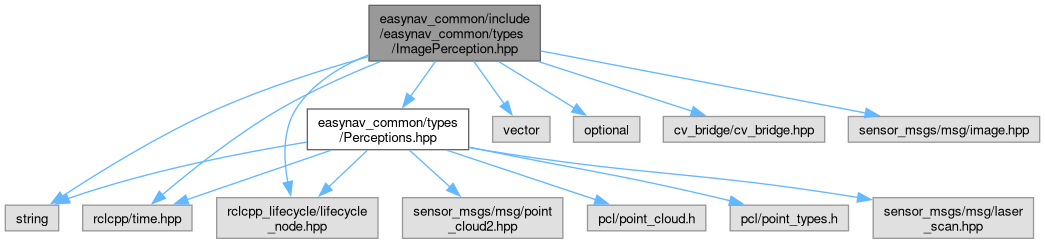
#include <string>#include <vector>#include "cv_bridge/cv_bridge.hpp"#include "rclcpp_lifecycle/lifecycle_node.hpp"#include "easynav_sensors/types/Perceptions.hpp"
Include dependency graph for ImagePerception.hpp:
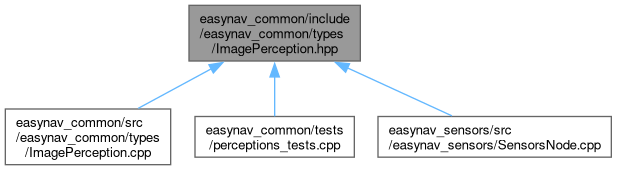
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ImagePerception |
| Represents a single image perception from a sensor. More... | |
| class | ImagePerceptionHandler |
| Handles the creation and updating of ImagePerception instances from sensor_msgs::msg::Image messages. More... | |
Namespaces | |
| namespace | easynav |
Typedefs | |
| using | ImagePerceptions |
| Alias for a vector of shared pointers to ImagePerception objects. | |
Functions | |
| rclcpp::Time | get_latest_image_perceptions_stamp (const ImagePerceptions &perceptions) |
| Retrieves the latest timestamp among a set of image-based perceptions. | |
Detailed Description
Defines data structures and utilities for representing and processing image perceptions.
This file contains the definition of the ImagePerception class, which holds image sensor data (as cv::Mat), and the ImagePerceptionHandler class, which handles subscriptions to image messages and transforms them into ImagePerception instances. It also defines an alias for a collection of such perceptions.
Generated by