SimplePlanner.cpp File Reference
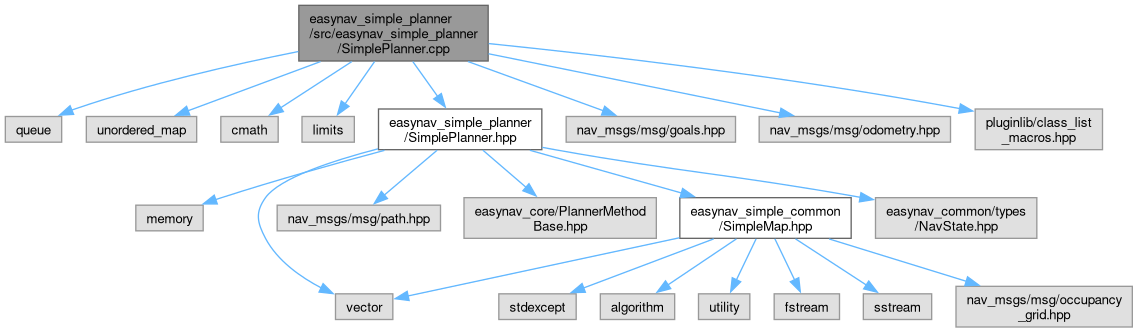
#include <queue>#include <unordered_map>#include <cmath>#include <limits>#include "easynav_simple_planner/SimplePlanner.hpp"#include "nav_msgs/msg/goals.hpp"#include "nav_msgs/msg/odometry.hpp"#include <pluginlib/class_list_macros.hpp>
Include dependency graph for SimplePlanner.cpp:
Classes | |
| struct | GridNode |
Namespaces | |
| namespace | easynav |
Functions | |
| double | compute_path_length (const nav_msgs::msg::Path &path) |
| double | heuristic (int x1, int y1, int x2, int y2) |
Variables | |
| std::vector< std::pair< int, int > > | neighbors8 |
Generated by