OdometryPerception.hpp File Reference
Defines data structures and utilities for representing and processing odometry perceptions. More...
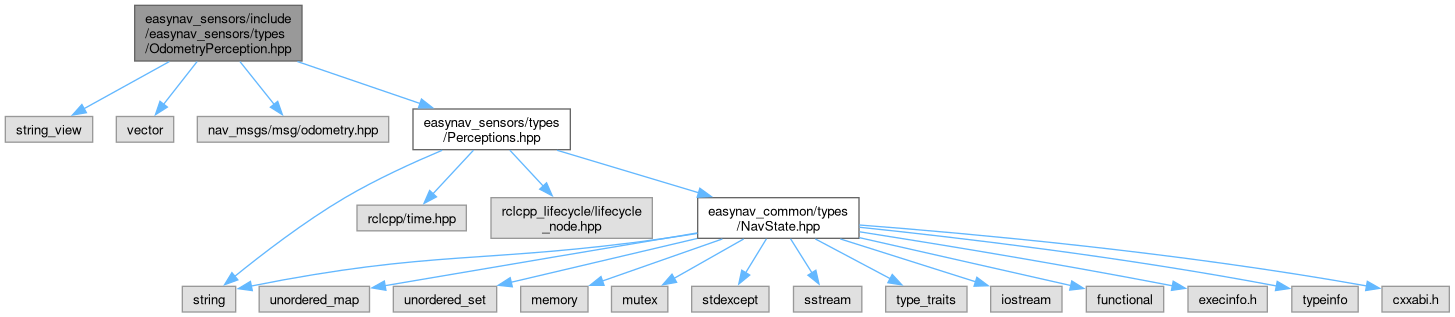
#include <string_view>#include <vector>#include "nav_msgs/msg/odometry.hpp"#include "easynav_sensors/types/Perceptions.hpp"
Include dependency graph for OdometryPerception.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | OdometryPerception |
| Represents a single odometry perception from a sensor. More... | |
| class | OdometryPerceptionHandler |
| Handles the creation and updating of OdometryPerception instances from nav_msgs::msg::Odometry messages. More... | |
Namespaces | |
| namespace | easynav |
Typedefs | |
| using | OdometryPerceptions |
| Alias for a vector of shared pointers to OdometryPerception objects. | |
Functions | |
| rclcpp::Time | get_latest_odometry_perceptions_stamp (const OdometryPerceptions &perceptions) |
| Retrieves the latest timestamp among a set of odometry perceptions. | |
Detailed Description
Defines data structures and utilities for representing and processing odometry perceptions.
This file contains the definition of the OdometryPerception class, which holds odometry sensor data, and the OdometryPerceptionHandler class, which handles subscriptions to odometry messages and transforms them into OdometryPerception instances. It also defines an alias for a collection of such perceptions.
Generated by