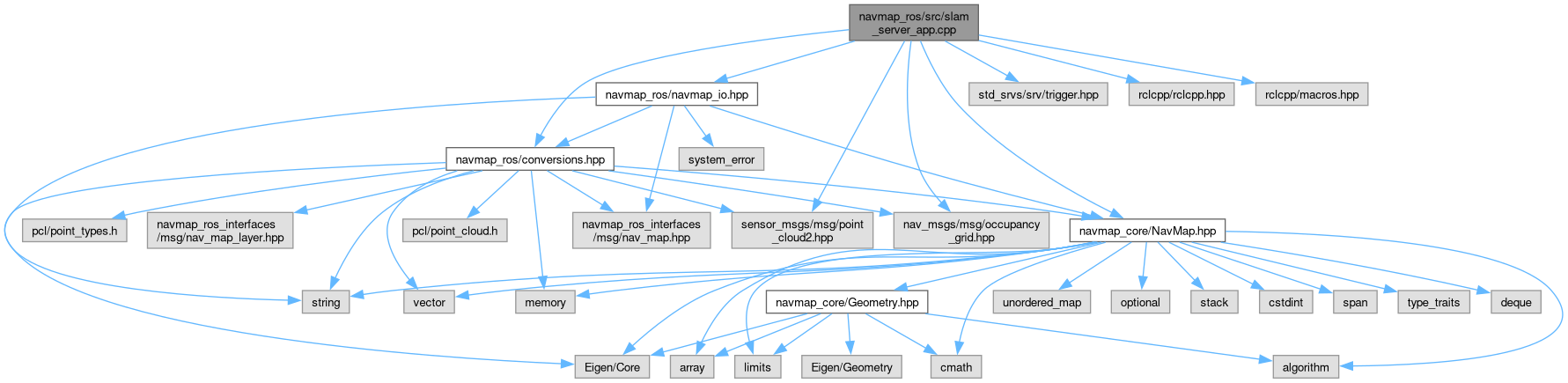
#include "navmap_core/NavMap.hpp"#include "navmap_ros/conversions.hpp"#include "navmap_ros/navmap_io.hpp"#include "nav_msgs/msg/occupancy_grid.hpp"#include "sensor_msgs/msg/point_cloud2.hpp"#include "std_srvs/srv/trigger.hpp"#include "rclcpp/rclcpp.hpp"#include "rclcpp/macros.hpp"
Include dependency graph for slam_server_app.cpp:
Classes | |
| class | SLAMServerNode |
Functions | |
| int | main (int argc, char *argv[]) |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char * | argv[] ) |
Generated by