Surface Struct Reference
A connected set of NavCels in a common reference frame. More...
#include <NavMap.hpp>
Collaboration diagram for Surface:
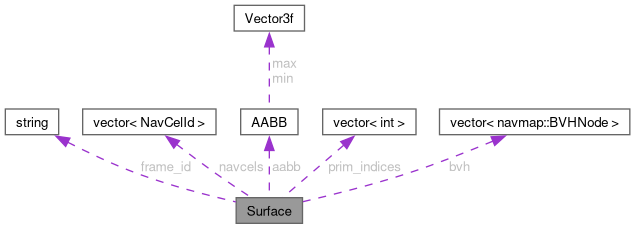
Public Attributes | |
| AABB | aabb |
| Bounds of the surface geometry. | |
| std::vector< BVHNode > | bvh |
| BVH nodes for this surface. | |
| std::string | frame_id |
| Frame id of this surface. | |
| std::vector< NavCelId > | navcels |
| NavCels belonging to this surface (global ids). | |
| std::vector< int > | prim_indices |
| Compact list of cids used by BVH leaves. | |
Detailed Description
A connected set of NavCels in a common reference frame.
Each navmap::Surface owns a subset of NavCels plus its own BVH. The frame_id is provided for external consumers (e.g., ROS TF).
Member Data Documentation
◆ aabb
| AABB aabb |
Bounds of the surface geometry.
◆ bvh
| std::vector<BVHNode> bvh |
BVH nodes for this surface.
◆ frame_id
| std::string frame_id |
Frame id of this surface.
◆ navcels
| std::vector<NavCelId> navcels |
NavCels belonging to this surface (global ids).
◆ prim_indices
| std::vector<int> prim_indices |
Compact list of cids used by BVH leaves.
The documentation for this struct was generated from the following file:
- navmap_core/include/navmap_core/NavMap.hpp
Generated by