pcl_utils.cpp File Reference
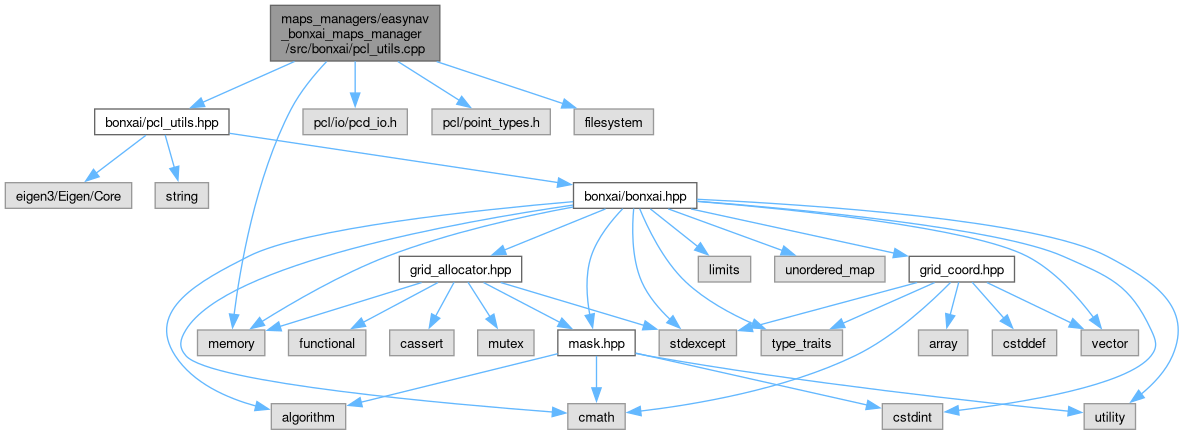
#include "bonxai/pcl_utils.hpp"#include <pcl/io/pcd_io.h>#include <pcl/point_types.h>#include <filesystem>#include <memory>
Include dependency graph for pcl_utils.cpp:
Functions | |
| template<typename PointT> | |
| bool | ReadPointsFromPCD_Impl (const std::string &filepath, std::vector< PointT > &points) |
| pcl::PointXYZ | toPointXYZ (const Bonxai::CoordT &p) |
| pcl::PointXYZ | toPointXYZ (const Bonxai::Point3D &p) |
| pcl::PointXYZ | toPointXYZ (const Eigen::Vector3d &p) |
| template<typename PointT> | |
| void | WritePointsFromPCD_Impl (const std::string &filepath, const std::vector< PointT > &points) |
Function Documentation
◆ ReadPointsFromPCD_Impl()
template<typename PointT>
| bool ReadPointsFromPCD_Impl | ( | const std::string & | filepath, |
| std::vector< PointT > & | points ) |
◆ toPointXYZ() [1/3]
| pcl::PointXYZ toPointXYZ | ( | const Bonxai::CoordT & | p | ) |
◆ toPointXYZ() [2/3]
| pcl::PointXYZ toPointXYZ | ( | const Bonxai::Point3D & | p | ) |
◆ toPointXYZ() [3/3]
| pcl::PointXYZ toPointXYZ | ( | const Eigen::Vector3d & | p | ) |
◆ WritePointsFromPCD_Impl()
template<typename PointT>
| void WritePointsFromPCD_Impl | ( | const std::string & | filepath, |
| const std::vector< PointT > & | points ) |
Generated by