Perceptions.hpp File Reference
Defines data structures and utilities for representing and processing sensor perceptions. More...
#include <string>#include "rclcpp/time.hpp"#include "rclcpp_lifecycle/lifecycle_node.hpp"#include "easynav_common/types/NavState.hpp"
Include dependency graph for Perceptions.hpp:

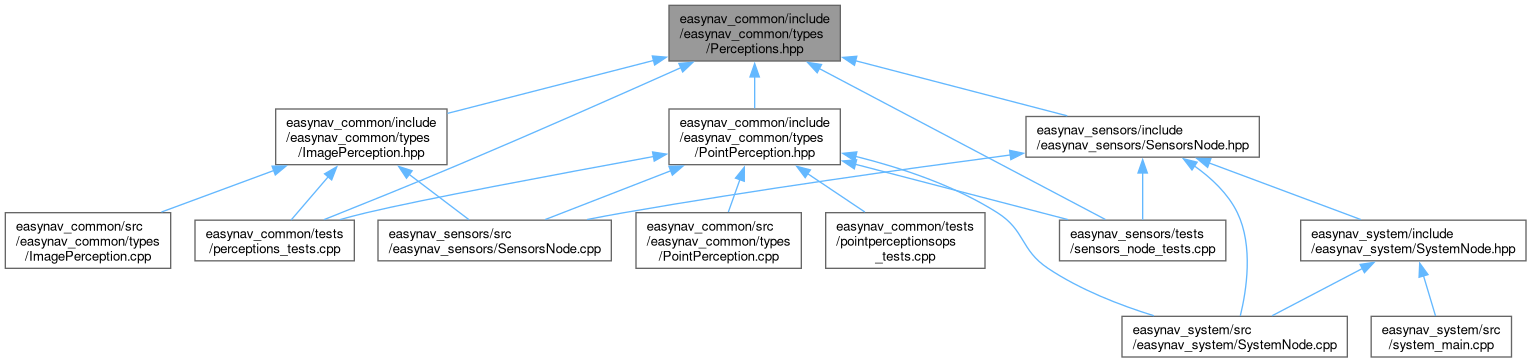
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | PerceptionBase |
| Abstract base class for representing a single sensor perception. More... | |
| class | PerceptionHandler |
| Abstract base class for pluginlib-based sensor perception handlers. More... | |
Namespaces | |
| namespace | easynav |
Typedefs | |
| using | PerceptionBasePtr = std::shared_ptr<PerceptionBase> |
| Shared pointer alias to PerceptionBase. | |
Functions | |
| template<typename T = PerceptionBase> | |
| std::vector< std::shared_ptr< T > > | get_perceptions (const std::vector< PerceptionBasePtr > &src) |
Extracts a homogeneous collection of perceptions of type T from a heterogeneous vector. | |
Detailed Description
Defines data structures and utilities for representing and processing sensor perceptions.
This file provides common interfaces for sensor perception handling:
- PerceptionBase: base class for sensor data.
- PerceptionPtr: utility for holding perception state and its subscription.
- get_perceptions: helper to extract typed collections from a heterogeneous container.
- PerceptionHandler: abstract base class for group-specific sensor handlers (pluginlib plugin).
Generated by