probabilistic_map.hpp File Reference
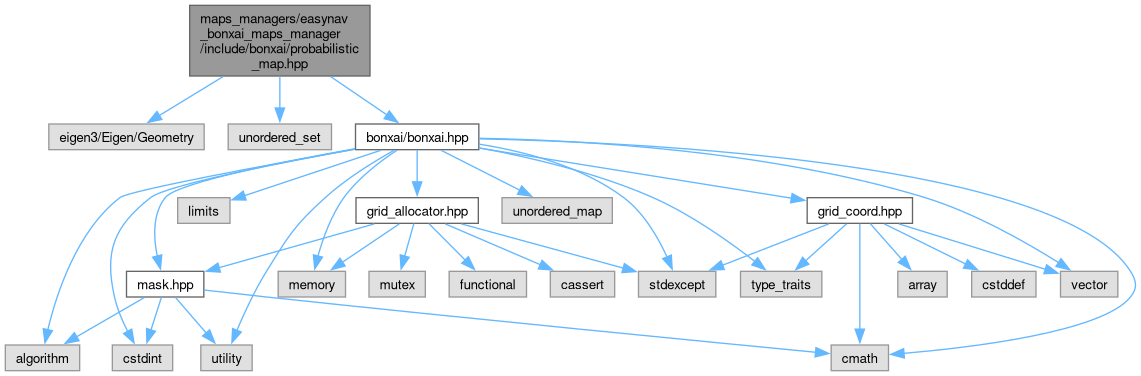
Include dependency graph for probabilistic_map.hpp:
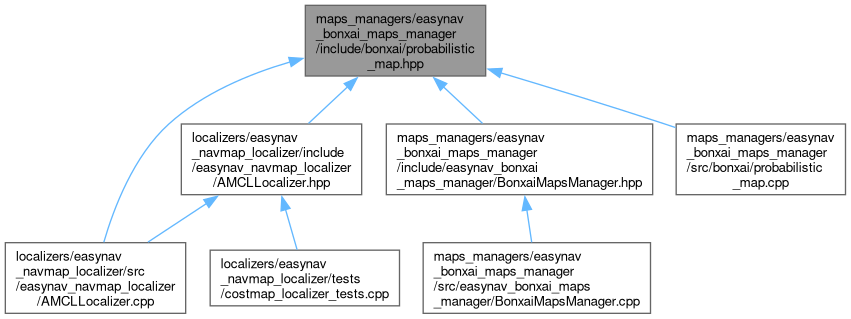
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | ProbabilisticMap::CellT |
| struct | ProbabilisticMap::Options |
| These default values are the same as OctoMap. More... | |
| class | ProbabilisticMap |
| The ProbabilisticMap class is meant to behave as much as possible as octomap::Octree, given the same voxel size. More... | |
Namespaces | |
| namespace | Bonxai |
Functions | |
| void | ComputeRay (const CoordT &key_origin, const CoordT &key_end, std::vector< CoordT > &ray) |
| template<class Functor> | |
| void | RayIterator (const CoordT &key_origin, const CoordT &key_end, const Functor &func) |
Generated by