Using the Routes Maps Manager with Costmaps
This how-to describes how to create and use navigation routes with
easynav_routes_maps_manager and how to constrain a 2D costmap
around those routes using the easynav_routes_maps_manager/RoutesCostmapFilter
plugin.
The process is split in two main steps:
Creating routes interactively and saving them to a YAML file.
Using the saved routes in a full navigation stack so that the costmap is filtered to keep the robot close to the defined routes.
Note
This how-to assumes that you already have an EasyNav workspace and a working costmap-based scenario (e.g., the indoor testcase). Only the parts specific to routes are shown here.
1) Creating routes
In this first step we will run only the maps manager node with a minimal configuration: a costmap maps manager providing the 2D map, and a routes maps manager with the routes costmap filter enabled. All other components (controller, planner, localizer, etc.) can be left out or run with dummy configurations, since we only care about editing and saving the routes.
Example parameters file
Below is an example of a minimal parameters file focused on costmap and routes only:
maps_manager_node:
ros__parameters:
use_sim_time: false
map_types: [costmap, routes]
routes:
freq: 10.0
plugin: easynav_routes_maps_manager/RoutesMapsManager
filters: [routes_costmap]
routes_costmap:
plugin: easynav_routes_maps_manager/RoutesCostmapFilter
min_cost: 50
route_width: 0.5
cycle_time_nort: 0.001
cycle_time_rt: 0.001
costmap:
freq: 10.0
plugin: easynav_costmap_maps_manager/CostmapMapsManager
package: easynav_indoor_testcase
map_path_file: maps/home2.yaml
filters: [obstacles, inflation]
obstacles:
plugin: easynav_costmap_maps_manager/CostmapMapsManager/ObstaclesFilter
inflation:
plugin: easynav_costmap_maps_manager/CostmapMapsManager/InflationFilter
inflation_radius: 1.3
inscribed_radius: 0.25
cost_scaling_factor: 3.0
Key points:
The
costmapblock is configured as in a normal EasyNav scenario and provides the 2D map on which the routes will be drawn.The
routesblock enables theeasynav::RoutesMapsManagerplugin and theeasynav::RoutesCostmapFilterfilter. In this phase we mainly care about seeing the effect of the routes corridor on the costmap while editing the routes.No
packageormap_path_fileare provided underroutes. In this case the routes manager starts with a single default segment from(0, 0, 0)to(1, 0, 0)in the map frame.
Running the maps manager
With the parameters file in place, start the maps manager node (for
example from a launch file or directly with ros2 run), and open
RViz22.
You should see:
The static and dynamic costmaps published by the costmap maps manager.
A single straight route segment (line + arrow) corresponding to the default route.
Editing routes with interactive markers
The following sequence illustrates how to edit and extend routes using the interactive markers published by the routes maps manager.
Step 0 – initial default segment
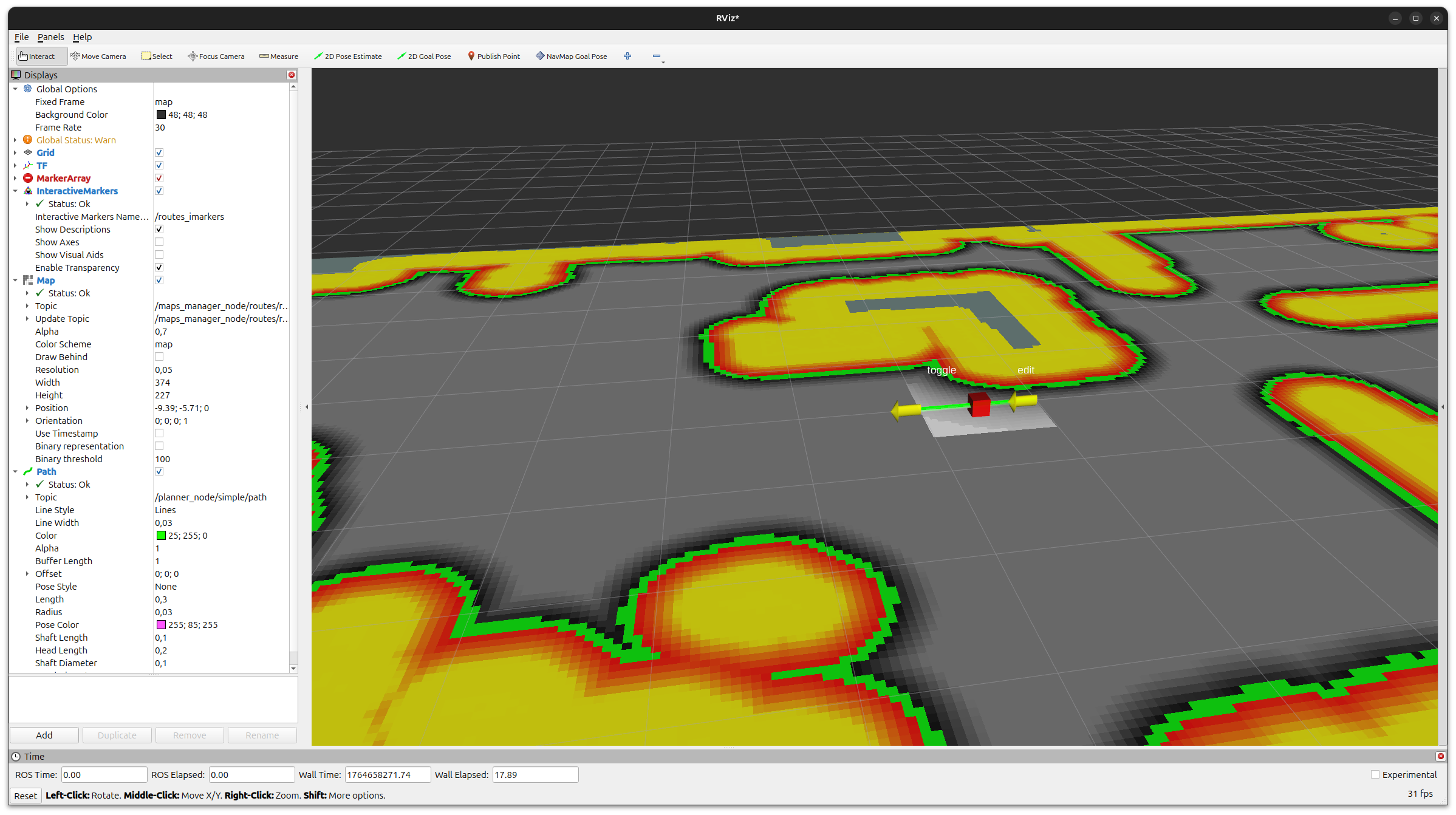
Figure 1 RViz2 just after starting the maps manager with no routes file:
a single default segment from (0, 0, 0) to (1, 0, 0) is shown.
When the routes maps manager starts without a configured routes file, it creates a single default segment in the map frame. In RViz2 you should see this straight segment (line + arrow) over the costmap.
Step 1 – enabling the edit markers
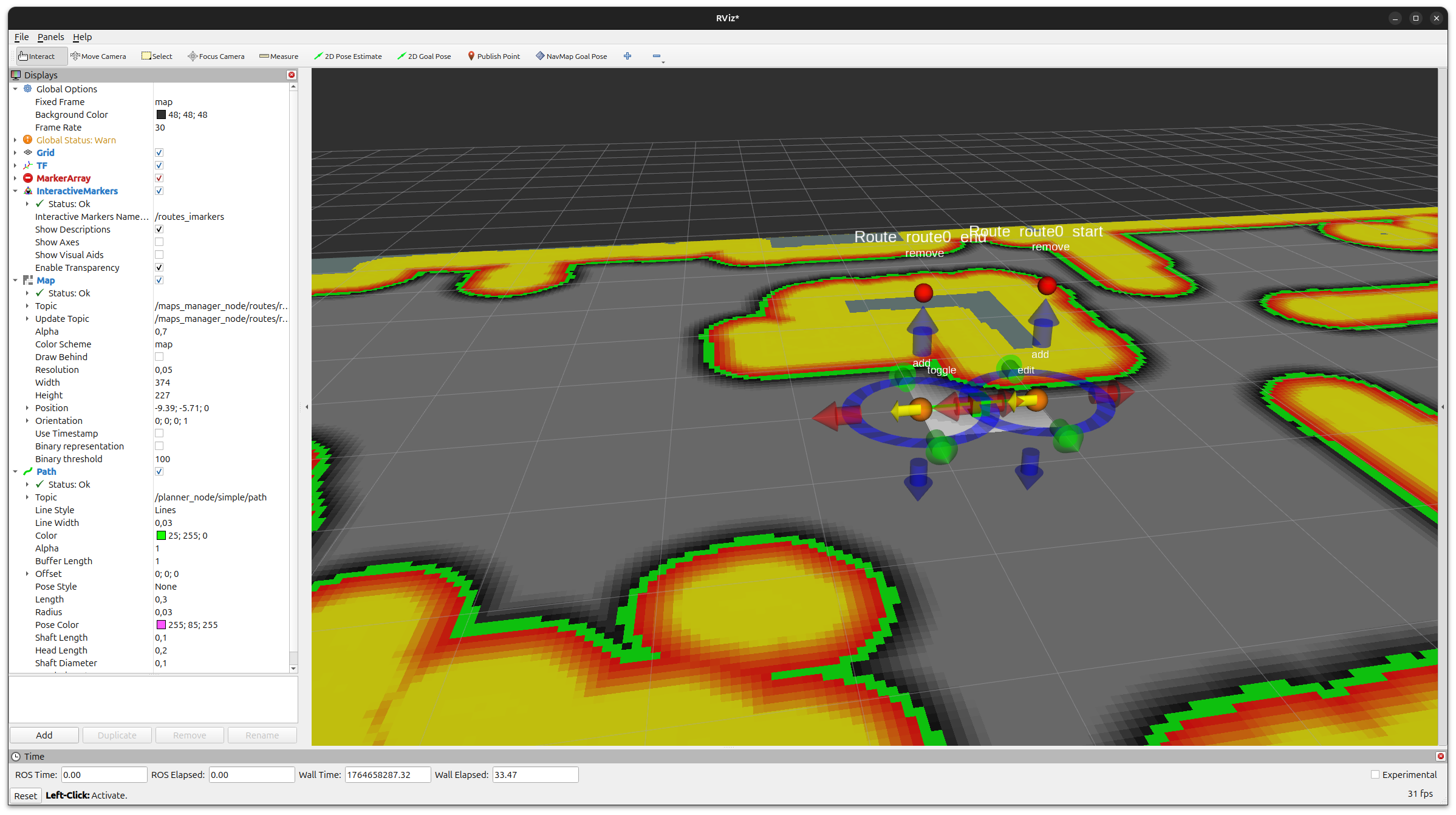
Figure 2 Clicking the green box enables the interactive markers for that segment.
The routes manager publishes interactive markers for editing the start
and end points of each segment and for adding/removing segments. In RViz2,
add an “Interactive Markers” display and select the server corresponding
to routes (typically routes_imarkers or similar, depending on
your namespace).
Click the green box associated with the segment to toggle edit mode on. When edit mode is enabled, RViz2 displays interactive markers on the segment endpoints:
Move arrows to translate an endpoint along each axis.
Rotation rings to rotate the endpoint pose.
The green box itself acts as an edit toggle for that segment.
Step 2 – moving the segment endpoint
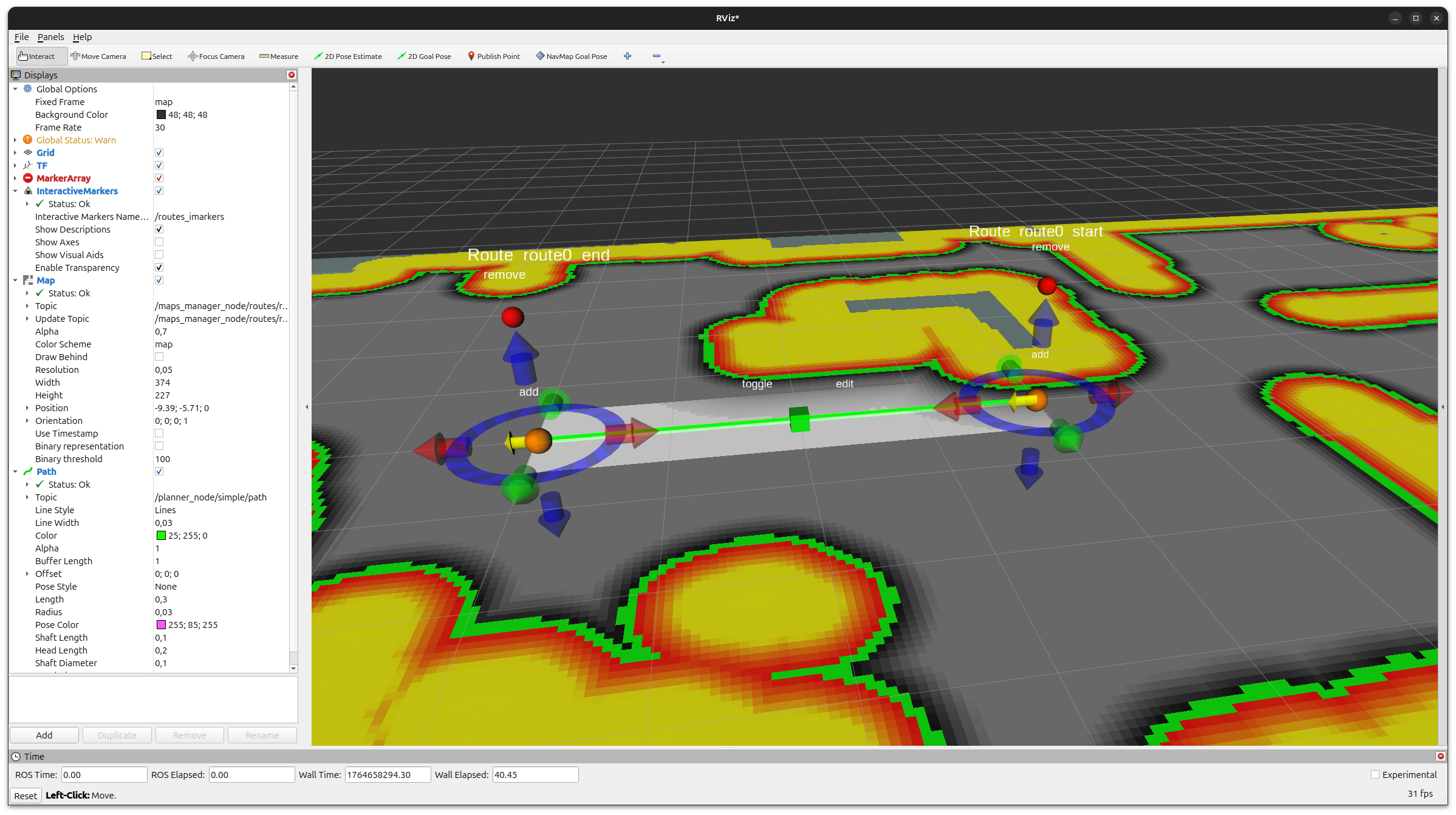
Figure 3 Using the red arrow handle to move the end of the segment.
Use the red arrow of the interactive marker to drag the end of the segment to the desired position. You can use this to align the route with a corridor or path on the costmap. The costmap corridor updated by the RoutesCostmapFilter will move accordingly.
Step 3 – changing orientation and adding a new segment
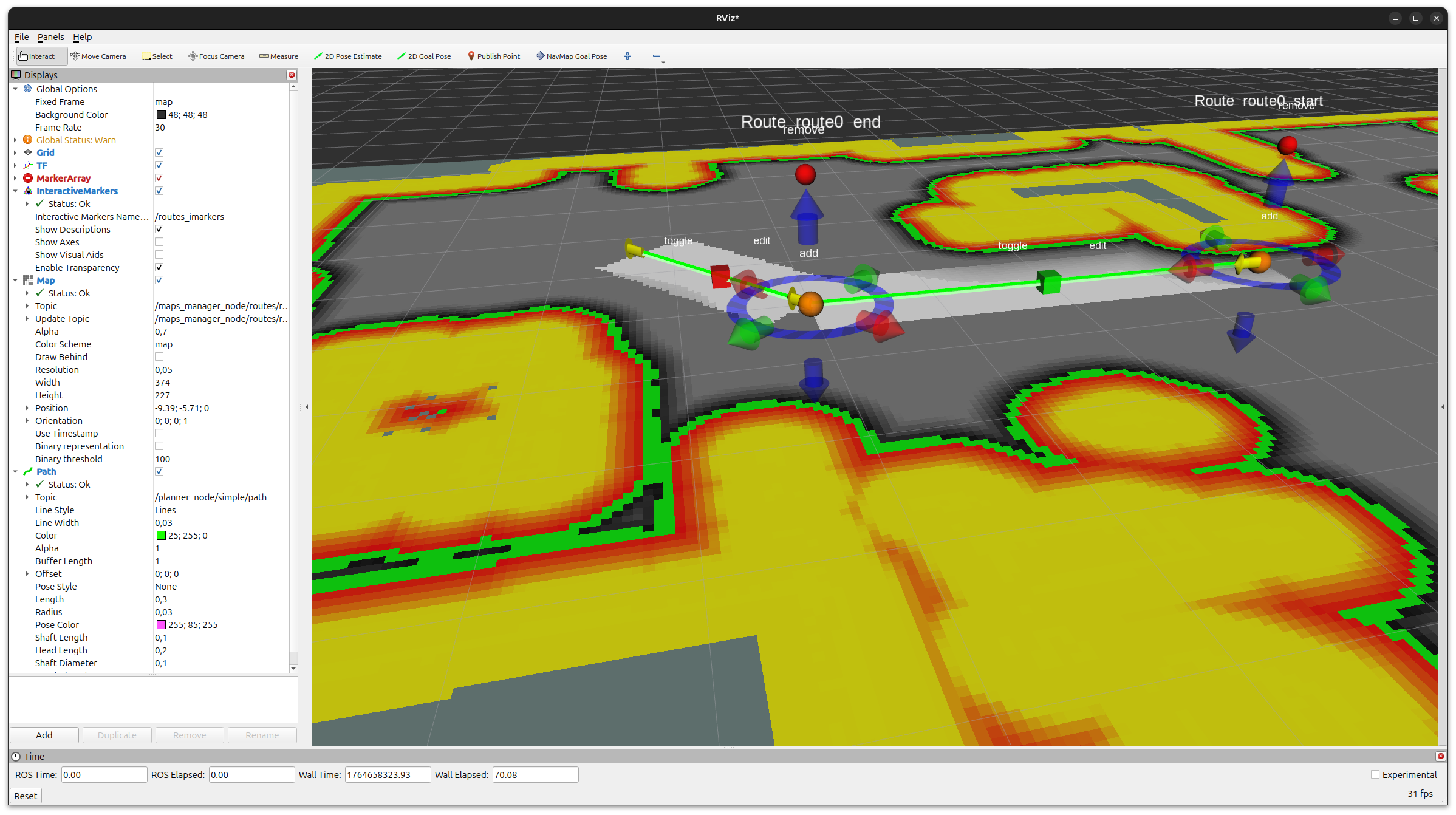
Figure 4 After rotating the endpoint and clicking the orange sphere, a new segment is created.
Rotate the endpoint so that its arrow points towards where you want the next segment to go. Then click the orange sphere near the end of the segment:
The orange sphere is the “add segment” button.
Clicking it creates a new segment chained from the current one, starting at the edited endpoint and following its orientation.
This lets you build a multi-segment route step by step.
Step 4 – switching which segment is being edited
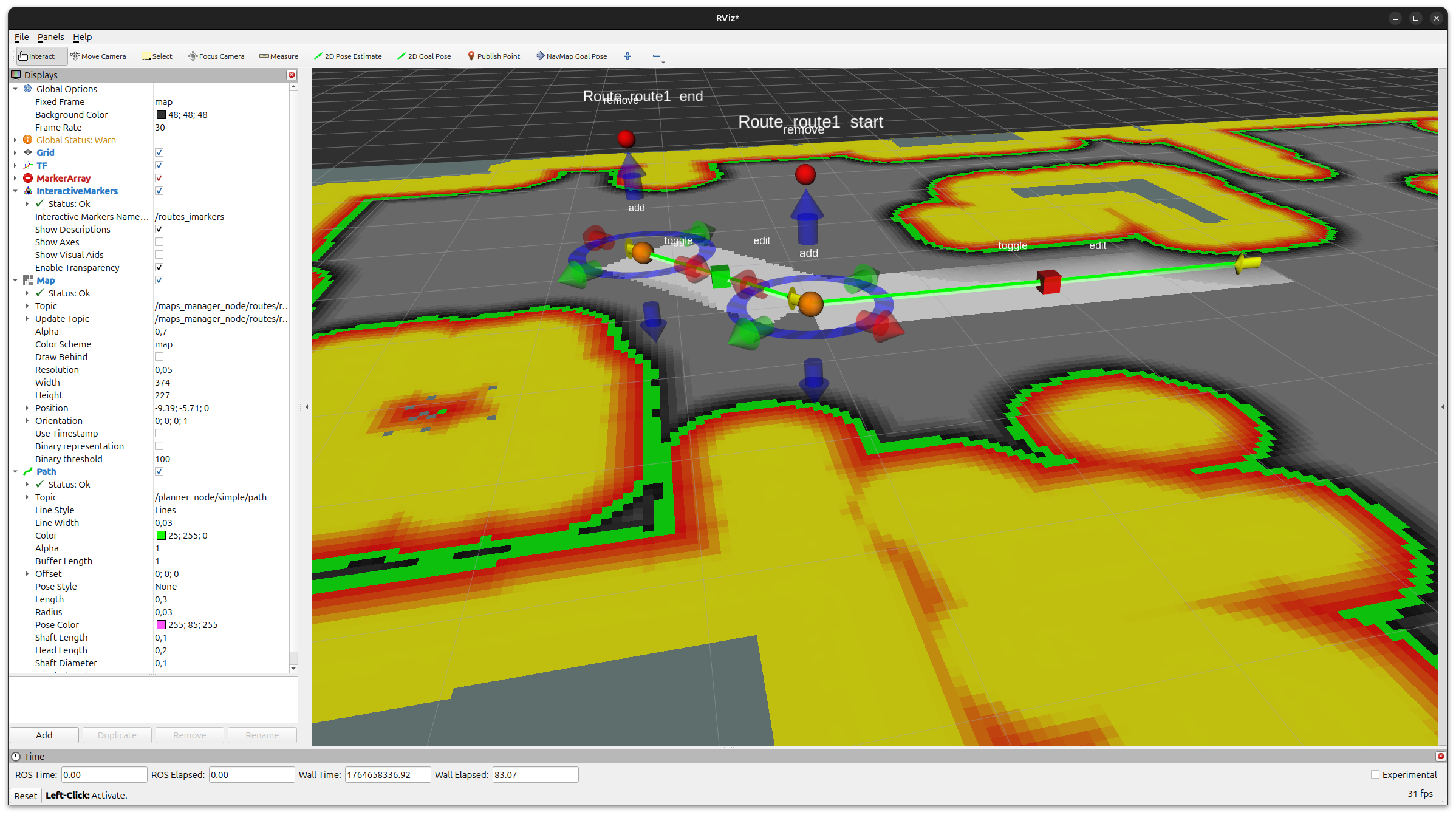
Figure 5 Toggling edit mode off for the first segment and on for the newly created one.
Once you have created multiple segments, you can choose which one is currently editable:
Click the edit box on a segment to toggle its edit mode on or off.
In this example, we disable editing on the first segment and enable it on the newly created segment.
From here you can repeat the same operations (move endpoint, rotate, use the orange sphere to add more segments) to extend the route as needed. To remove a segment, use the red box associated with that segment, which acts as a “delete segment” button.
Saving routes to a YAML file
Once you are satisfied with your route layout, you can persist it to a
YAML file using the save_routes service provided by the routes maps
manager.
Call the service with:
ros2 service call /maps_manager_node/routes/save_routes std_srvs/srv/Trigger {}
If routes.package and routes.map_path_file are configured, the
routes are written back to that YAML file following the format described
in the easynav_routes_maps_manager README (see the
easynav_routes_maps_manager package for details). If they are not
configured (as in the minimal example above), it is saved in
/tmp/routes.yaml.