NavMap Class Reference
Main container for navigable surfaces, geometry, and layers. More...
#include <NavMap.hpp>
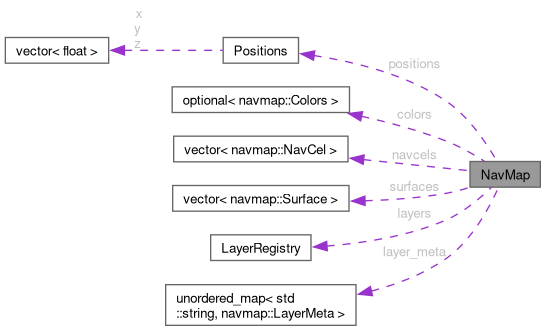
Collaboration diagram for NavMap:
Classes | |
| struct | LocateOpts |
| Options for the locate functions. More... | |
Public Member Functions | |
| template<typename T> | |
| std::shared_ptr< LayerView< T > > | add_layer (const std::string &name, const std::string &description, const std::string &unit, const std::string &src_layer) |
| Create (or get) a typed per-NavCel layer, initialized from another layer. | |
| template<typename T> | |
| std::shared_ptr< LayerView< T > > | add_layer (const std::string &name, const std::string &description={}, const std::string &unit={}, T default_value=T{}) |
| Create (or get) a typed per-NavCel layer with a default value. | |
| NavCelId | add_navcel (uint32_t v0, uint32_t v1, uint32_t v2) |
| Append a triangle (NavCel) and return its id. | |
| void | add_navcel_to_surface (std::size_t surface_index, NavCelId cid) |
| Add an existing nav cell id to a surface. | |
| std::size_t | add_surface (const Surface &s) |
| Append an existing Surface (by value). | |
| std::size_t | add_surface (Surface &&s) |
| Add a Surface by move (avoids copy). | |
| uint32_t | add_vertex (const Eigen::Vector3f &p) |
| Append a vertex and return its index. | |
| void | build_adjacency () |
| Build topological adjacency between neighboring NavCels. | |
| bool | closest_navcel (const Eigen::Vector3f &p_world, size_t &surface_idx, NavCelId &cid, Eigen::Vector3f &closest_point, float &sqdist, int restrict_surface=-1) const |
| Find the closest triangle to a point. | |
| std::size_t | create_surface (std::string frame_id) |
| Create a new empty Surface and append it to the map. | |
| Surface | create_surface_obj (const std::string &frame_id) const |
| Create a standalone Surface object (not yet added to the map). | |
| std::optional< LayerMeta > | get_layer_meta (const std::string &name) const |
| Return metadata for a layer if present (implementation-defined). | |
| std::array< NavCelId, 3 > | get_neighbors (NavCelId cid) const |
Return the three neighbor NavCel ids of triangle cid. | |
| bool | has_layer (const std::string &name) const |
Check whether a layer named name exists. | |
| bool | has_same_geometry (const NavMap &other) const |
| Fast check for identical geometry (vertices and NavCel indices). | |
| template<typename T> | |
| void | layer_clear (const std::string &name, T value=T{}) |
| Reset all values in a layer to a given value. | |
| template<typename T> | |
| bool | layer_copy (const std::string &src, const std::string &dst) |
| Copy values from one layer into another. | |
| template<typename T> | |
| T | layer_get (const std::string &name, NavCelId cid, T def=T{}) const |
| Get a per-cell value as the requested type. | |
| template<typename T> | |
| void | layer_set (const std::string &name, NavCelId cid, T value) |
| Set a per-cell value (creates/retypes the layer if needed). | |
| std::size_t | layer_size (const std::string &name) const |
| Number of entries in a layer (should equal navcels.size()). | |
| std::string | layer_type_name (const std::string &name) const |
| Human-readable type name for a layer ("float", "double", "uint8", ...). | |
| std::vector< std::string > | list_layers () const |
| List all layer names currently stored. | |
| bool | locate_navcel (const Eigen::Vector3f &p_world, size_t &surface_idx, NavCelId &cid, Eigen::Vector3f &bary, Eigen::Vector3f *hit_pt) const |
| Locate the triangle under / near a world point (convenience). | |
| bool | locate_navcel (const Eigen::Vector3f &p_world, size_t &surface_idx, NavCelId &cid, Eigen::Vector3f &bary, Eigen::Vector3f *hit_pt, const LocateOpts &opts) const |
| Locate the triangle under / near a world point. | |
| bool | locate_navcel_core (const Eigen::Vector3f &p_world, std::size_t &surface_idx, NavCelId &cid, Eigen::Vector3f &bary, Eigen::Vector3f *hit_pt, const LocateOpts &opts) const |
| Forward to the existing low-level locator (implemented in .cpp). | |
| void | mark_vertex_updated (PointId) |
| Mark a vertex as updated (reserved for future cache invalidation). | |
| Eigen::Vector3f | navcel_centroid (NavCelId cid) const |
| Triangle centroid (computed on the fly). | |
| std::vector< NavCelId > | navcel_neighbors (NavCelId cid) const |
| Return up to 3 neighbor cell ids (skips invalid entries). | |
| template<typename T> | |
| T | navcel_value (NavCelId cid, const LayerView< T > &layer) const |
Read the value of a typed per-NavCel layer at triangle cid. | |
| NavMap () | |
| Copy constructor: deep copy of geometry, surfaces, layers and metadata. | |
| NavMap (const NavMap &other) | |
| Copy constructor: deep copy of geometry, surfaces, layers and metadata. | |
| NavMap & | operator= (const NavMap &other) |
| Copy assignment optimized to avoid geometry duplication. | |
| NavMap & | operator= (NavMap &&other) noexcept |
| Move assignment. | |
| bool | raycast (const Eigen::Vector3f &o, const Eigen::Vector3f &d, NavCelId &hit_cid, float &t, Eigen::Vector3f &hit_pt) const |
| Raycast against all surfaces to find the closest hit. | |
| void | raycast_many (const std::vector< Ray > &rays, std::vector< RayHit > &out, bool first_hit_only=true) const |
| Batched raycast. | |
| void | rebuild_geometry_accels () |
| Recompute derived geometry and acceleration structures. | |
| bool | remove_surface (std::size_t surface_index) |
| Remove a Surface by index. | |
| double | sample_layer_at (const std::string &name, const Eigen::Vector3f &p_world, double def=std::numeric_limits< double >::quiet_NaN()) const |
| Sample a per-NavCel layer at a world position. | |
| template<typename T> | |
| bool | set_area (const Eigen::Vector3f &p_world, T value, const std::string &layer_name, AreaShape shape, float size) |
| Set a per-NavCel layer to a constant value over a 2D area. | |
Public Attributes | |
| std::optional< Colors > | colors |
| Optional per-vertex colors. | |
| std::unordered_map< std::string, LayerMeta > | layer_meta |
| Optional metadata per layer. | |
| LayerRegistry | layers |
| Per-NavCel layers (runtime registry). | |
| std::vector< NavCel > | navcels |
| All triangles (global indexing). | |
| Positions | positions |
| Vertex positions (SoA). | |
| std::vector< Surface > | surfaces |
| Surfaces (partitions of navcels). | |
Detailed Description
Main container for navigable surfaces, geometry, and layers.
A navmap::NavMap aggregates vertex positions, a list of navmap::NavCel triangles (global indexing), one or more navmap::Surface partitions, and a navmap::LayerRegistry with arbitrary per-NavCel scalar attributes.
Typical workflow
- Fill positions, navcels, and surfaces.
- Call rebuild_geometry_accels() to compute normals, areas, adjacency, and build per-surface BVHs.
- Create layers via LayerRegistry::add_or_get() sized to navcels.size().
- Query with locate_navcel(), raycast(), or closest_navcel().
Constructor & Destructor Documentation
◆ NavMap() [1/2]
| NavMap | ( | ) |
Copy constructor: deep copy of geometry, surfaces, layers and metadata.
◆ NavMap() [2/2]
Copy constructor: deep copy of geometry, surfaces, layers and metadata.
Member Function Documentation
◆ add_layer() [1/2]
template<typename T>
| std::shared_ptr< LayerView< T > > add_layer | ( | const std::string & | name, |
| const std::string & | description, | ||
| const std::string & | unit, | ||
| const std::string & | src_layer ) |
Create (or get) a typed per-NavCel layer, initialized from another layer.
If a layer with name exists, it is returned (size preserved). If the size differs from navcels.size(), it is resized. If the source layer src_layer exists, its values are copied into the destination using layer_copy(), performing type conversion if necessary. If the source layer does not exist, the destination is left with defaults.
- Template Parameters
-
T Storage type.
- Parameters
-
name Layer name. description Human-readable description (optional). unit Unit (e.g., "m", "deg", "%"), optional. src_layer Source layer name to initialize from.
- Returns
- Shared view of the created/updated layer.
◆ add_layer() [2/2]
template<typename T>
| std::shared_ptr< LayerView< T > > add_layer | ( | const std::string & | name, |
| const std::string & | description = {}, | ||
| const std::string & | unit = {}, | ||
| T | default_value = T{} ) |
Create (or get) a typed per-NavCel layer with a default value.
If a layer with name exists, it is returned (size preserved). If the size differs from navcels.size(), values are reinitialized to default_value.
- Template Parameters
-
T Storage type.
- Parameters
-
name Layer name. description Human-readable description (optional). unit Unit (e.g., "m", "deg", "%"), optional. default_value Initial value for all triangles.
- Returns
- Shared view of the created/updated layer.
◆ add_navcel()
| NavCelId add_navcel | ( | uint32_t | v0, |
| uint32_t | v1, | ||
| uint32_t | v2 ) |
Append a triangle (NavCel) and return its id.
- Parameters
-
v0 Index of vertex 0. v1 Index of vertex 1. v2 Index of vertex 2.
◆ add_navcel_to_surface()
| void add_navcel_to_surface | ( | std::size_t | surface_index, |
| NavCelId | cid ) |
Add an existing nav cell id to a surface.
◆ add_surface() [1/2]
| std::size_t add_surface | ( | const Surface & | s | ) |
Append an existing Surface (by value).
- Returns
- New index in surfaces.
◆ add_surface() [2/2]
| std::size_t add_surface | ( | Surface && | s | ) |
Add a Surface by move (avoids copy).
- Returns
- New index in surfaces.
◆ add_vertex()
| uint32_t add_vertex | ( | const Eigen::Vector3f & | p | ) |
Append a vertex and return its index.
◆ build_adjacency()
| void build_adjacency | ( | ) |
Build topological adjacency between neighboring NavCels.
Two triangles are neighbors if they share an undirected edge. Called by rebuild_geometry_accels().
◆ closest_navcel()
| bool closest_navcel | ( | const Eigen::Vector3f & | p_world, |
| size_t & | surface_idx, | ||
| NavCelId & | cid, | ||
| Eigen::Vector3f & | closest_point, | ||
| float & | sqdist, | ||
| int | restrict_surface = -1 ) const |
Find the closest triangle to a point.
Traverses per-surface BVHs with distance lower-bounds; returns the closest triangle, the closest point on it, and the squared distance.
- Parameters
-
p_world Query point in world coordinates. [out] surface_idx Surface index of the closest triangle. [out] cid NavCel id of the closest triangle. [out] closest_point Closest point on that triangle. [out] sqdist Squared distance to p_world.restrict_surface If >= 0, restrict search to this surface.
- Returns
- true if any triangle was considered.
◆ create_surface()
| std::size_t create_surface | ( | std::string | frame_id | ) |
Create a new empty Surface and append it to the map.
- Parameters
-
frame_id TF frame id for the surface.
- Returns
- Index of the created surface in surfaces.
◆ create_surface_obj()
| Surface create_surface_obj | ( | const std::string & | frame_id | ) | const |
◆ get_layer_meta()
| std::optional< LayerMeta > get_layer_meta | ( | const std::string & | name | ) | const |
Return metadata for a layer if present (implementation-defined).
- Parameters
-
name Layer name.
- Returns
- Optional metadata if available.
◆ get_neighbors()
Return the three neighbor NavCel ids of triangle cid.
- Parameters
-
cid NavCel id.
- Returns
- Array with neighbor ids or max uint32_t if boundary.
◆ has_layer()
| bool has_layer | ( | const std::string & | name | ) | const |
Check whether a layer named name exists.
◆ has_same_geometry()
| bool has_same_geometry | ( | const NavMap & | other | ) | const |
Fast check for identical geometry (vertices and NavCel indices).
◆ layer_clear()
template<typename T>
| void layer_clear | ( | const std::string & | name, |
| T | value = T{} ) |
Reset all values in a layer to a given value.
- Parameters
-
T Expected storage type of the layer. name Layer name. value Value to assign to all entries.
◆ layer_copy()
template<typename T>
| bool layer_copy | ( | const std::string & | src, |
| const std::string & | dst ) |
Copy values from one layer into another.
Both layers must have the same type and size.
- Parameters
-
T Storage type (e.g. float, uint8_t). src Name of source layer. dst Name of destination layer.
- Returns
- true if copy succeeded, false if type/size mismatch.
◆ layer_get()
template<typename T>
| T layer_get | ( | const std::string & | name, |
| NavCelId | cid, | ||
| T | def = T{} ) const |
Get a per-cell value as the requested type.
If the stored type matches T, returns directly. Otherwise falls back to conversion vía double: floating → static_cast<T>, integral → clamp [0,max(T)] y redondeo (llround).
Si la capa no existe o cid está fuera de rango, devuelve def.
- Template Parameters
-
T uint8_t, float, or double
- Parameters
-
name Layer name cid Triangle id def Default value on failure
- Returns
- Value converted to T, or
def
◆ layer_set()
template<typename T>
| void layer_set | ( | const std::string & | name, |
| NavCelId | cid, | ||
| T | value ) |
Set a per-cell value (creates/retypes the layer if needed).
- Template Parameters
-
T Storage type.
- Parameters
-
name Layer name. cid Triangle id. value Value to write.
◆ layer_size()
| std::size_t layer_size | ( | const std::string & | name | ) | const |
Number of entries in a layer (should equal navcels.size()).
◆ layer_type_name()
| std::string layer_type_name | ( | const std::string & | name | ) | const |
Human-readable type name for a layer ("float", "double", "uint8", ...).
◆ list_layers()
| std::vector< std::string > list_layers | ( | ) | const |
List all layer names currently stored.
- Returns
- Vector of layer names.
◆ locate_navcel() [1/2]
| bool locate_navcel | ( | const Eigen::Vector3f & | p_world, |
| size_t & | surface_idx, | ||
| NavCelId & | cid, | ||
| Eigen::Vector3f & | bary, | ||
| Eigen::Vector3f * | hit_pt ) const |
Locate the triangle under / near a world point (convenience).
Uses default LocateOpts. See the full overload for details.
- Parameters
-
p_world Query point in world coordinates. [out] surface_idx Surface index owning the located triangle. [out] cid Located NavCel id. [out] bary Barycentric coordinates of the hit. [out] hit_pt Optional: projected point on the surface.
- Returns
- true if a triangle has been located.
◆ locate_navcel() [2/2]
| bool locate_navcel | ( | const Eigen::Vector3f & | p_world, |
| size_t & | surface_idx, | ||
| NavCelId & | cid, | ||
| Eigen::Vector3f & | bary, | ||
| Eigen::Vector3f * | hit_pt, | ||
| const LocateOpts & | opts ) const |
Locate the triangle under / near a world point.
Strategy: 1) If LocateOpts::hint_cid is provided, try walking neighbors. 2) Else, try a per-surface 2D seed grid near (x,y) with planar test. 3) If still not found, vertical raycast (downward or upward).
- Parameters
-
p_world Query point in world coordinates. [out] surface_idx Surface index owning the located triangle. [out] cid Located NavCel id. [out] bary Barycentric coordinates of the hit. [out] hit_pt Optional: projected point on the surface. opts Tuning options (see LocateOpts).
- Returns
- true if a triangle has been located.
◆ locate_navcel_core()
| bool locate_navcel_core | ( | const Eigen::Vector3f & | p_world, |
| std::size_t & | surface_idx, | ||
| NavCelId & | cid, | ||
| Eigen::Vector3f & | bary, | ||
| Eigen::Vector3f * | hit_pt, | ||
| const LocateOpts & | opts ) const |
Forward to the existing low-level locator (implemented in .cpp).
This hook should call your original, detailed locator implementation. The robust overload above will fall back to vertical rays if needed.
◆ mark_vertex_updated()
| void mark_vertex_updated | ( | PointId | ) |
Mark a vertex as updated (reserved for future cache invalidation).
- Parameters
-
pid Vertex id (unused for now).
◆ navcel_centroid()
| Eigen::Vector3f navcel_centroid | ( | NavCelId | cid | ) | const |
Triangle centroid (computed on the fly).
◆ navcel_neighbors()
Return up to 3 neighbor cell ids (skips invalid entries).
◆ navcel_value()
Read the value of a typed per-NavCel layer at triangle cid.
- Template Parameters
-
T Layer storage type (must match the layer).
- Parameters
-
cid NavCel id. layer Typed layer view.
- Returns
- The value for triangle
cid.
◆ operator=() [1/2]
Copy assignment optimized to avoid geometry duplication.
If both maps share identical geometry (same vertex arrays and NavCel indices), layers are synchronized by name/type (copy-on-difference) and destination-only layers are removed. Otherwise, a full deep copy is performed.
◆ operator=() [2/2]
Move assignment.
Transfers ownership of geometry, surfaces, layers and metadata.
◆ raycast()
| bool raycast | ( | const Eigen::Vector3f & | o, |
| const Eigen::Vector3f & | d, | ||
| NavCelId & | hit_cid, | ||
| float & | t, | ||
| Eigen::Vector3f & | hit_pt ) const |
Raycast against all surfaces to find the closest hit.
- Parameters
-
o Ray origin (world). d Ray direction (normalized). [out] hit_cid NavCel id hit (valid if return is true). [out] t Distance along ray (valid if return is true). [out] hit_pt World-space intersection point.
- Returns
- true if any triangle was hit.
◆ raycast_many()
| void raycast_many | ( | const std::vector< Ray > & | rays, |
| std::vector< RayHit > & | out, | ||
| bool | first_hit_only = true ) const |
Batched raycast.
- Parameters
-
rays Input rays. [out] out Output hits (parallel to rays).first_hit_only If true, stop at the first surface that hits.
◆ rebuild_geometry_accels()
| void rebuild_geometry_accels | ( | ) |
Recompute derived geometry and acceleration structures.
Computes triangle normals and areas, builds adjacency between neighbors, and builds per-surface BVHs. Layer sizes are not changed automatically; call LayerRegistry::resize_all() if you modified navcels.
◆ remove_surface()
| bool remove_surface | ( | std::size_t | surface_index | ) |
Remove a Surface by index.
Does NOT touch navcels / positions.
- Note
- The caller must ensure there are no dangling indices.
- Returns
- true if the surface existed and was removed.
◆ sample_layer_at()
| double sample_layer_at | ( | const std::string & | name, |
| const Eigen::Vector3f & | p_world, | ||
| double | def = std::numeric_limits<double>::quiet_NaN() ) const |
Sample a per-NavCel layer at a world position.
Locates the containing triangle and returns its layer value.
- Parameters
-
name Layer name. p_world World-space query. def Default value if not found.
- Returns
- Value or
defif missing.
◆ set_area()
template<typename T>
| bool set_area | ( | const Eigen::Vector3f & | p_world, |
| T | value, | ||
| const std::string & | layer_name, | ||
| AreaShape | shape, | ||
| float | size ) |
Set a per-NavCel layer to a constant value over a 2D area.
The center is the ground projection of p_world. If the projected NavCel cannot be determined, returns false. Supports U8/F32/F64 layers.
Efficiency: BFS from the seed NavCel with XY AABB pruning against the circumscribed square of the area. Inclusion test by triangle centroid.
- Template Parameters
-
T uint8_t, float, or double
- Parameters
-
p_world 3D point in world coordinates (projected to ground) value Value to set in the layer layer_name Target layer name shape CIRCULAR or RECTANGULAR size Radius (CIRCULAR) or side length (RECTANGULAR)
- Returns
- true if the seed NavCel was located and the layer updated
Member Data Documentation
◆ colors
| std::optional<Colors> colors |
Optional per-vertex colors.
◆ layer_meta
| std::unordered_map<std::string, LayerMeta> layer_meta |
Optional metadata per layer.
◆ layers
| LayerRegistry layers |
Per-NavCel layers (runtime registry).
◆ navcels
| std::vector<NavCel> navcels |
All triangles (global indexing).
◆ positions
| Positions positions |
Vertex positions (SoA).
◆ surfaces
| std::vector<Surface> surfaces |
Surfaces (partitions of navcels).
The documentation for this class was generated from the following files:
- navmap_core/include/navmap_core/NavMap.hpp
- navmap_core/src/navmap_core/NavMap.cpp
Generated by