TestPointPerception Class Reference
Inheritance diagram for TestPointPerception:
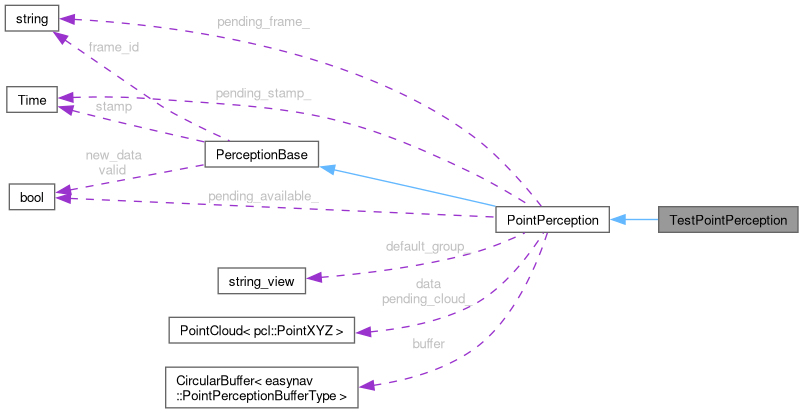
Collaboration diagram for TestPointPerception:
Public Member Functions | |
| bool | buffer_empty () const |
| bool | buffer_full () const |
| bool | buffer_latest (easynav::PointPerceptionBufferType &out) const |
| std::size_t | buffer_size () const |
| void | debug_print_buffer (const std::string &header) |
| Public Member Functions inherited from PointPerception | |
| const PointPerceptionBufferType & | get_last_perception () const |
| Retrieves the most recent buffered perception (independently of it has a valid TF) without removing it from the buffer. | |
| void | integrate_pending_perceptions () |
| PointPerception & | operator= (const PointPerception &other) |
| PointPerception () | |
| PointPerception (const PointPerception &other) | |
| void | resize (std::size_t size) |
| Resizes the internal point cloud storage. | |
| void | set_pending_cloud (pcl::PointCloud< pcl::PointXYZ > &&cloud, std::string &&frame, const rclcpp::Time &stamp) |
| Stores a pending cloud atomically for later integration. | |
| Public Member Functions inherited from PerceptionBase | |
| virtual | ~PerceptionBase ()=default |
Additional Inherited Members | |
| Static Public Member Functions inherited from PointPerception | |
| static bool | supports_msg_type (std::string_view t) |
| Checks if a ROS message type is supported by this perception. | |
| Public Attributes inherited from PointPerception | |
| pcl::PointCloud< pcl::PointXYZ > | data |
| The 3D point cloud data associated with this perception. | |
| bool | pending_available_ {false} |
| pcl::PointCloud< pcl::PointXYZ > | pending_cloud_ |
| std::string | pending_frame_ |
| rclcpp::Time | pending_stamp_ |
| Public Attributes inherited from PerceptionBase | |
| std::string | frame_id |
| Coordinate frame associated with the perception. | |
| bool | new_data = false |
| Whether the data has changed since the last observation. | |
| rclcpp::Time | stamp |
| Timestamp of the perception (ROS time). | |
| bool | valid = false |
| Whether the perception contains valid data. | |
| Static Public Attributes inherited from PointPerception | |
| static constexpr std::string_view | default_group_ = "points" |
| Group identifier for point perceptions. | |
| Protected Attributes inherited from PointPerception | |
| CircularBuffer< PointPerceptionBufferType > | buffer {10} |
| std::mutex | mutex_ |
Member Function Documentation
◆ buffer_empty()
| bool buffer_empty | ( | ) | const |
◆ buffer_full()
| bool buffer_full | ( | ) | const |
◆ buffer_latest()
| bool buffer_latest | ( | easynav::PointPerceptionBufferType & | out | ) | const |
◆ buffer_size()
| std::size_t buffer_size | ( | ) | const |
◆ debug_print_buffer()
| void debug_print_buffer | ( | const std::string & | header | ) |
The documentation for this class was generated from the following file:
- easynav_sensors/tests/perceptions_tests.cpp
Generated by