|
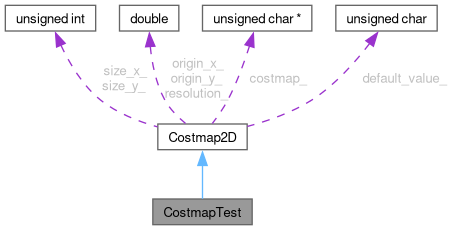
| | CostmapTest (unsigned int size_x, unsigned int size_y, double resolution, double origin_x, double origin_y, unsigned char default_val=0) |
| |
| unsigned char * | getCostmap () |
| |
| unsigned int | getSize () |
| |
| void | raytraceLine (CostmapAction ca, unsigned int x0, unsigned int y0, unsigned int x1, unsigned int y1, unsigned int max_length=UINT_MAX, unsigned int min_length=0) |
| |
| unsigned int | cellDistance (double world_dist) |
| | Given distance in the world... convert it to cells.
|
| |
| void | convexFillCells (const std::vector< MapLocation > &polygon, std::vector< MapLocation > &polygon_cells) |
| | Get the map cells that fill a convex polygon.
|
| |
| bool | copyCostmapWindow (const Costmap2D &map, double win_origin_x, double win_origin_y, double win_size_x, double win_size_y) |
| | Turn this costmap into a copy of a window of a costmap passed in.
|
| |
| bool | copyWindow (const Costmap2D &source, unsigned int sx0, unsigned int sy0, unsigned int sxn, unsigned int syn, unsigned int dx0, unsigned int dy0) |
| | Copies the (x0,y0)..(xn,yn) window from source costmap into a current costmap.
|
| |
| | Costmap2D () |
| | Default constructor.
|
| |
| | Costmap2D (const Costmap2D &map) |
| | Copy constructor for a costmap, creates a copy efficiently.
|
| |
| | Costmap2D (const nav_msgs::msg::OccupancyGrid &map) |
| | Constructor for a costmap from an OccupancyGrid map.
|
| |
| | Costmap2D (unsigned int cells_size_x, unsigned int cells_size_y, double resolution, double origin_x, double origin_y, unsigned char default_value=0) |
| | Constructor for a costmap.
|
| |
| unsigned char * | getCharMap () const |
| | Will return a pointer to the underlying unsigned char array used as the costmap.
|
| |
| unsigned char | getCost (unsigned int index) const |
| | Get the cost of a cell in the costmap.
|
| |
| unsigned char | getCost (unsigned int mx, unsigned int my) const |
| | Get the cost of a cell in the costmap.
|
| |
| unsigned char | getDefaultValue () |
| | Get the default background value of the costmap.
|
| |
| unsigned int | getIndex (unsigned int mx, unsigned int my) const |
| | Given two map coordinates... compute the associated index.
|
| |
| bool | getMapRegionOccupiedByPolygon (const std::vector< geometry_msgs::msg::Point > &polygon, std::vector< MapLocation > &polygon_map_region) |
| | Gets the map region occupied by polygon.
|
| |
| mutex_t * | getMutex () |
| |
| double | getOriginX () const |
| | Accessor for the x origin of the costmap.
|
| |
| double | getOriginY () const |
| | Accessor for the y origin of the costmap.
|
| |
| double | getResolution () const |
| | Accessor for the resolution of the costmap.
|
| |
| unsigned int | getSizeInCellsX () const |
| | Accessor for the x size of the costmap in cells.
|
| |
| unsigned int | getSizeInCellsY () const |
| | Accessor for the y size of the costmap in cells.
|
| |
| double | getSizeInMetersX () const |
| | Accessor for the x size of the costmap in meters.
|
| |
| double | getSizeInMetersY () const |
| | Accessor for the y size of the costmap in meters.
|
| |
| bool | inBounds (unsigned int x, unsigned int y) const |
| | Checks whether a given cell coordinate is within the bounds of the costmap.
|
| |
| void | indexToCells (unsigned int index, unsigned int &mx, unsigned int &my) const |
| | Given an index... compute the associated map coordinates.
|
| |
| void | mapToWorld (unsigned int mx, unsigned int my, double &wx, double &wy) const |
| | Convert from map coordinates to world coordinates.
|
| |
| void | mapToWorldNoBounds (int mx, int my, double &wx, double &wy) const |
| | Convert from map coordinates to world coordinates with no bounds checking.
|
| |
| Costmap2D & | operator= (const Costmap2D &map) |
| | Overloaded assignment operator.
|
| |
| void | polygonOutlineCells (const std::vector< MapLocation > &polygon, std::vector< MapLocation > &polygon_cells) |
| | Get the map cells that make up the outline of a polygon.
|
| |
| void | resetMap (unsigned int x0, unsigned int y0, unsigned int xn, unsigned int yn) |
| | Reset the costmap in bounds.
|
| |
| void | resetMapToValue (unsigned int x0, unsigned int y0, unsigned int xn, unsigned int yn, unsigned char value) |
| | Reset the costmap in bounds to a value.
|
| |
| void | resizeMap (unsigned int size_x, unsigned int size_y, double resolution, double origin_x, double origin_y) |
| | Resize the costmap.
|
| |
| void | restoreMapRegionOccupiedByPolygon (const std::vector< MapLocation > &polygon_map_region) |
| | Restores the corresponding map region using given map region.
|
| |
| bool | setConvexPolygonCost (const std::vector< geometry_msgs::msg::Point > &polygon, unsigned char cost_value) |
| | Sets the cost of a convex polygon to a desired value.
|
| |
| void | setCost (unsigned int mx, unsigned int my, unsigned char cost) |
| | Set the cost of a cell in the costmap.
|
| |
| void | setDefaultValue (unsigned char c) |
| | Set the default background value of the costmap.
|
| |
| void | setMapRegionOccupiedByPolygon (const std::vector< MapLocation > &polygon_map_region, unsigned char new_cost_value) |
| | Sets the given map region to desired value.
|
| |
| void | toOccupancyGridMsg (nav_msgs::msg::OccupancyGrid &msg) const |
| | Converts the current costmap into a nav_msgs::msg::OccupancyGrid message.
|
| |
| virtual void | updateOrigin (double new_origin_x, double new_origin_y) |
| | Move the origin of the costmap to a new location....
|
| |
| bool | worldToMap (double wx, double wy, unsigned int &mx, unsigned int &my) const |
| | Convert from world coordinates to map coordinates.
|
| |
| bool | worldToMapContinuous (double wx, double wy, float &mx, float &my) const |
| | Convert from world coordinates to map coordinates.
|
| |
| void | worldToMapEnforceBounds (double wx, double wy, int &mx, int &my) const |
| | Convert from world coordinates to map coordinates, constraining results to legal bounds.
|
| |
| void | worldToMapNoBounds (double wx, double wy, int &mx, int &my) const |
| | Convert from world coordinates to map coordinates without checking for legal bounds.
|
| |
| virtual | ~Costmap2D () |
| | Destructor.
|
| |
 Public Member Functions inherited from Costmap2D
Public Member Functions inherited from Costmap2D